![]()

MIVisionX Python ML Model Validation Tool
MIVisionX ML Model Validation Tool using pre-trained ONNX / NNEF / Caffe models to analyze, summarize, & validate.
Pre-trained models in ONNX, NNEF, & Caffe formats are supported by MIVisionX. The app first converts the pre-trained models to AMD Neural Net Intermediate Representation (NNIR), once the model has been translated into AMD NNIR (AMD’s internal open format), the Optimizer goes through the NNIR and applies various optimizations which would allow the model to be deployed on to target hardware most efficiently. Finally, AMD NNIR is converted into OpenVX C code, which is compiled and wrapped with a python API to run on any targeted hardware.
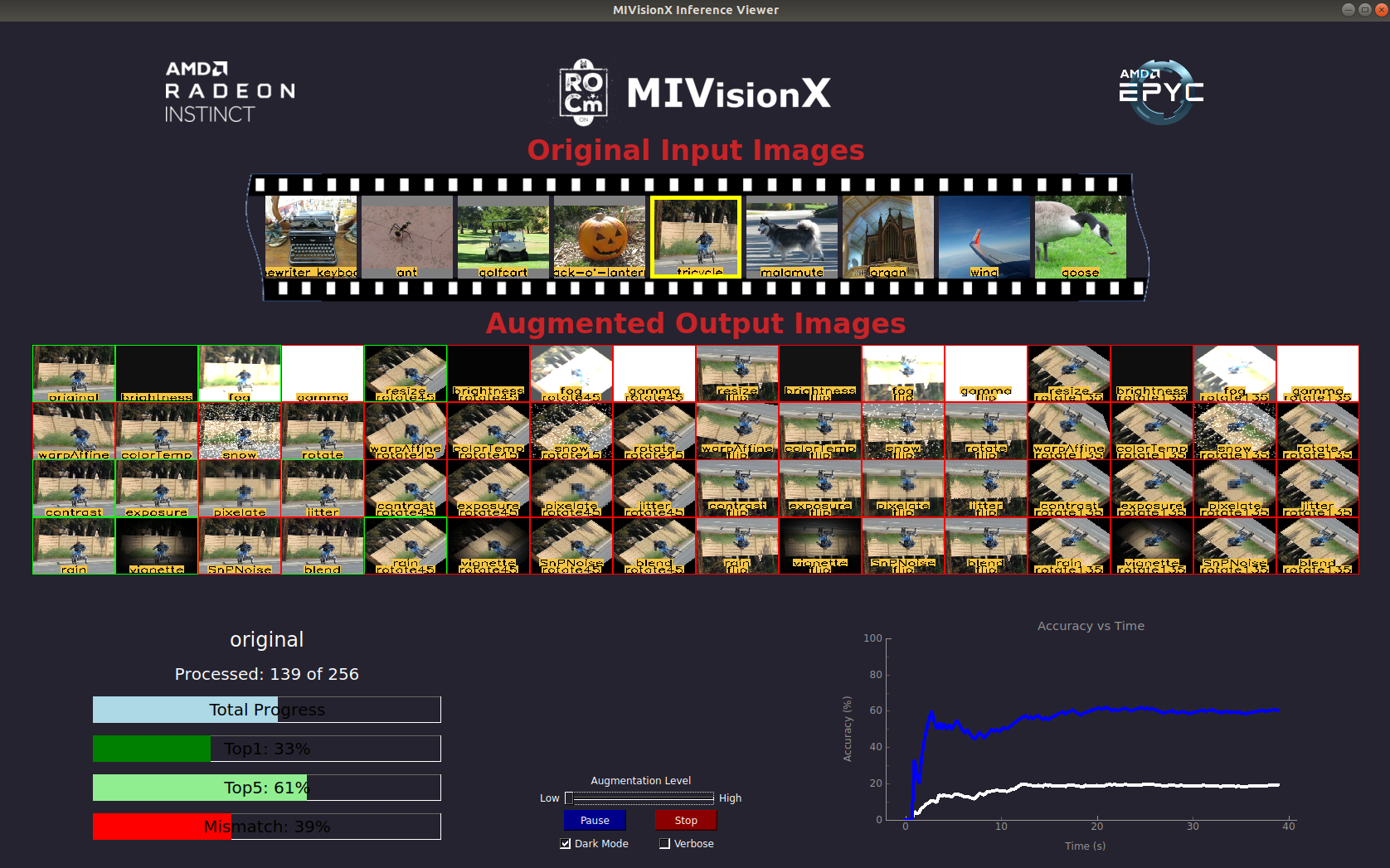
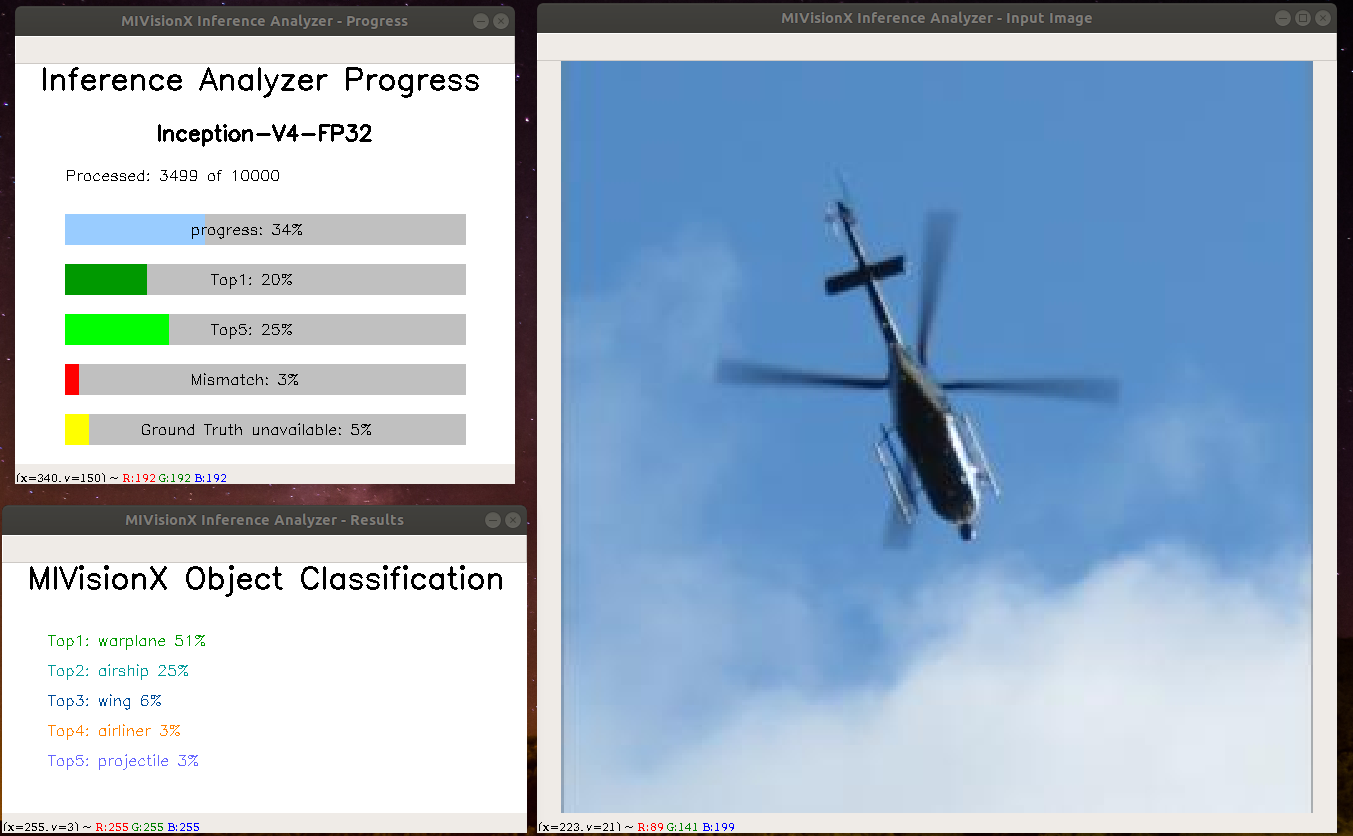
- MIVisionX Validation Tool - Processing Images
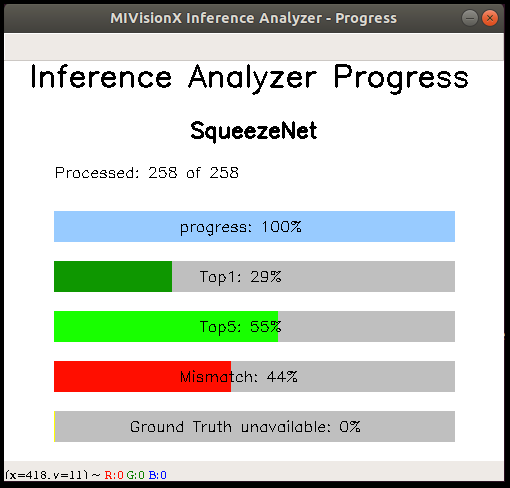
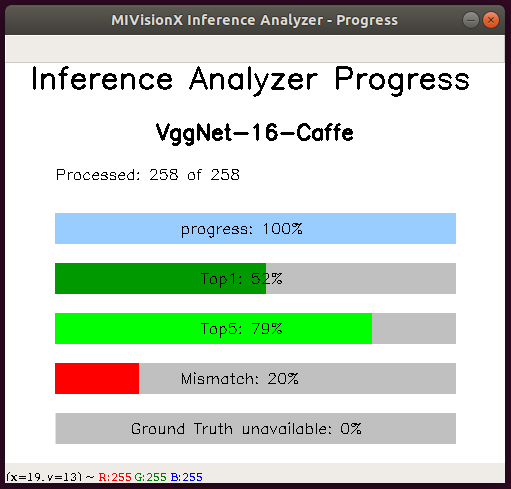
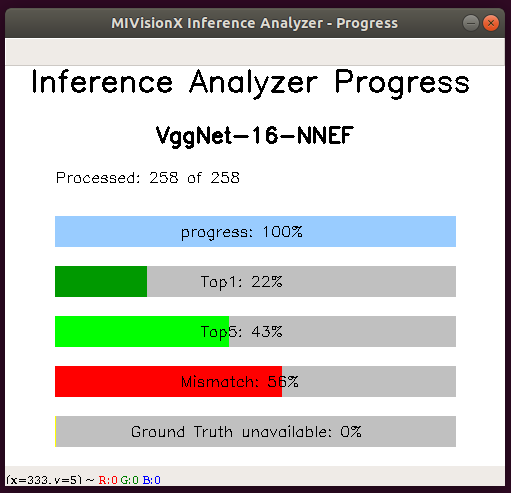
- MIVisionX Validation Tool - Processing Images Complete
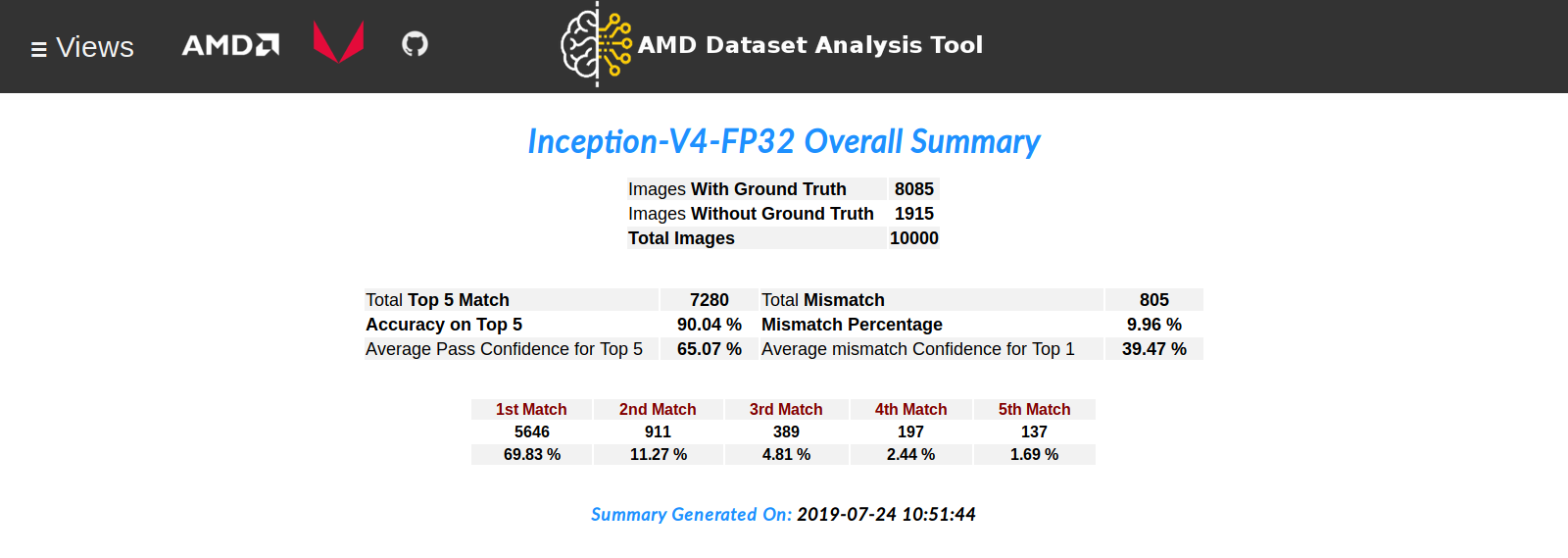
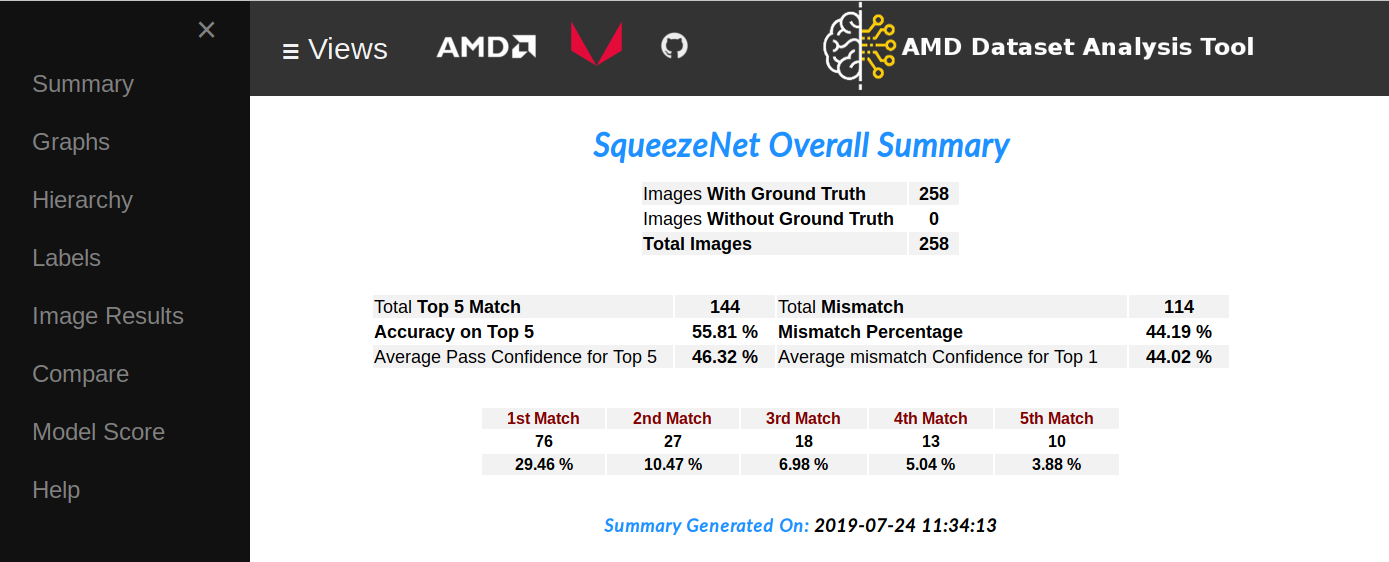
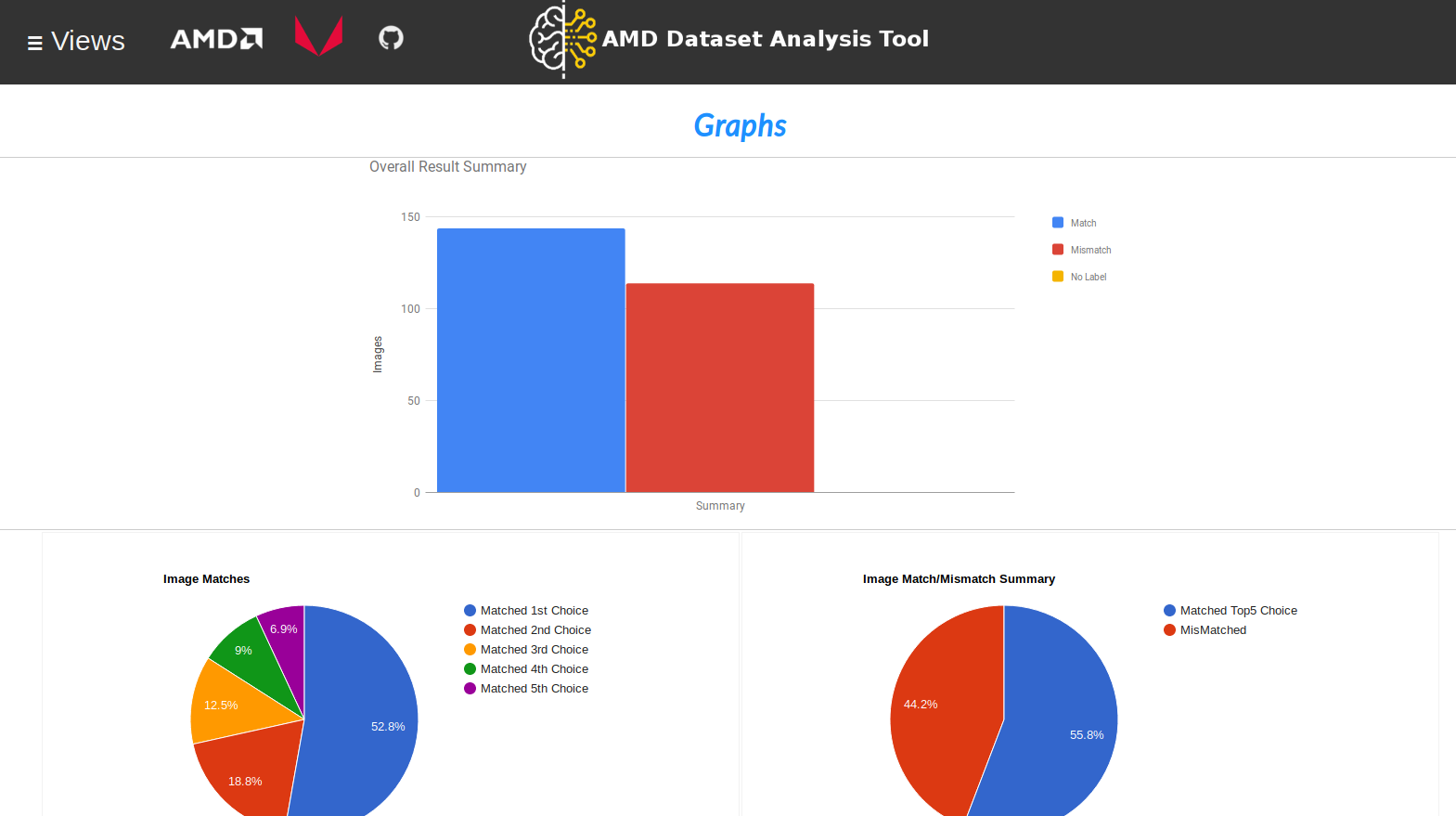
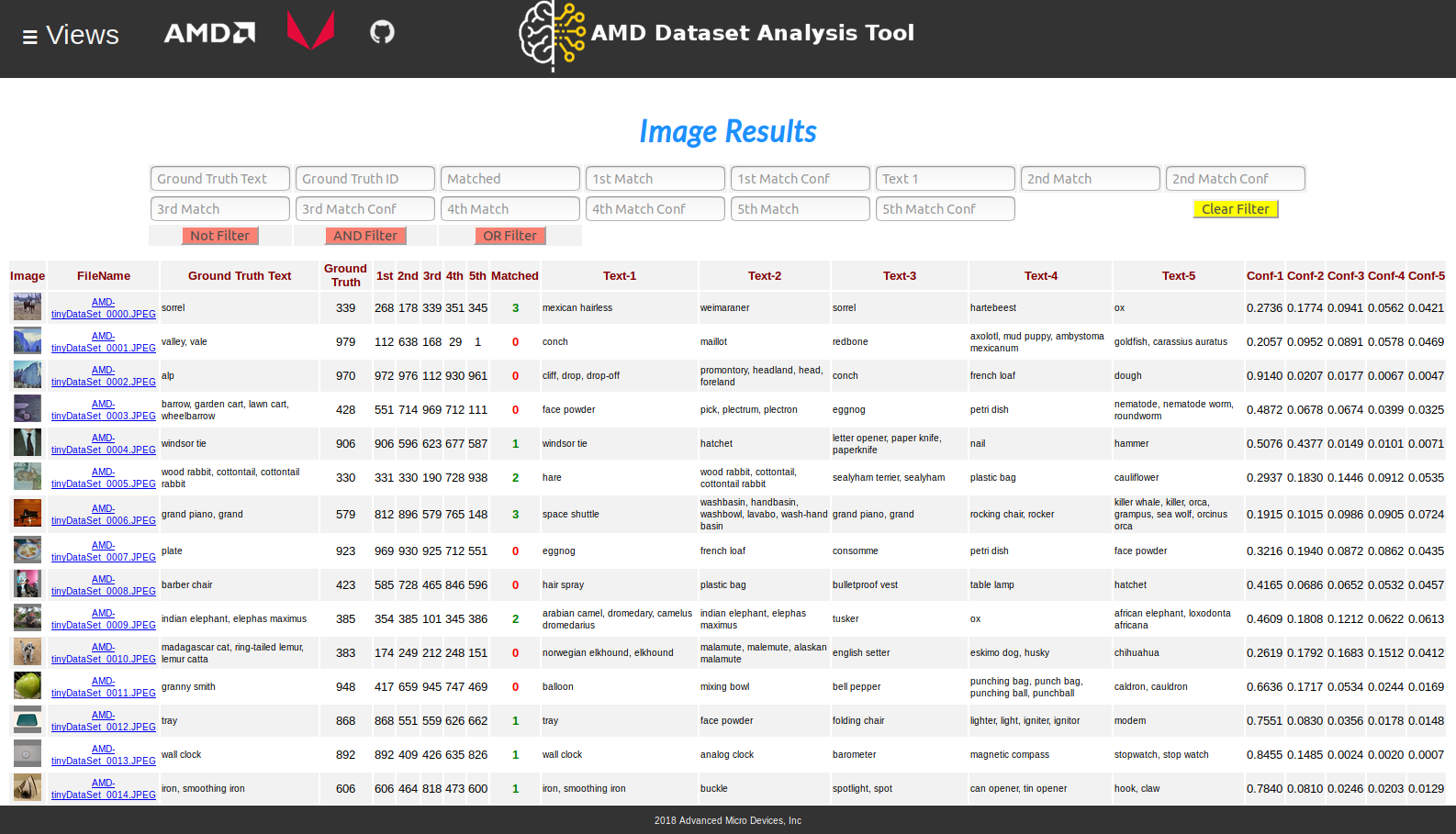
- MIVisionX Validation Tool - Results
Analyzer Index
- MIVisionX Model Compiler & Optimizer
- Prerequisites
- Usage
- Supported Pre-Trained Model Formats
- Samples
Prerequisites
- Ubuntu
16.04/18.04or CentOS7.5/7.6 - ROCm supported hardware
- AMD Radeon GPU or AMD APU required
- Latest ROCm
- Build & Install MIVisionX
- Install Python QT graph module
pip install pyqtgraph
- Export Path & Libraries required
export PATH=$PATH:/opt/rocm/bin
export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:/opt/rocm/lib
NOTE: To get the best performance from the validation toolkit use the RPP Develop Branch
- Set number of OpenMP Threads
export OMP_NUM_THREADS=<number of threads to use>
Use MIVisionX Docker
MIVisionX provides developers with docker images for Ubuntu 16.04, Ubuntu 18.04, CentOS 7.5, & CentOS 7.6. Using docker images developers can quickly prototype and build applications without having to be locked into a single system setup or lose valuable time figuring out the dependencies of the underlying software.
Docker with display option
-
Check docker prerequisites
-
Start docker with display
sudo docker pull mivisionx/ubuntu-18.04:latest
xhost +local:root
sudo docker run -it --device=/dev/kfd --device=/dev/dri --cap-add=SYS_RAWIO --device=/dev/mem --group-add video --network host --env DISPLAY=unix$DISPLAY --privileged --volume $XAUTH:/root/.Xauthority --volume /tmp/.X11-unix/:/tmp/.X11-unix mivisionx/ubuntu-18.04:latest
- Test display with MIVisionX sample
export PATH=$PATH:/opt/rocm/bin
export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:/opt/rocm/lib
runvx /opt/rocm/share/mivisionx/samples/gdf/canny.gdf
- Run Samples
Usage
Command Line Interface (CLI)
usage: python mivisionx_validation_tool.py [-h]
--model_format MODEL_FORMAT
--model_name MODEL_NAME
--model MODEL
--model_input_dims MODEL_INPUT_DIMS
--model_output_dims MODEL_OUTPUT_DIMS
--model_batch_size MODEL_BATCH_SIZE
--rocal_mode rocal_MODE
--label LABEL
--output_dir OUTPUT_DIR
--image_dir IMAGE_DIR
[--image_val IMAGE_VAL]
[--hierarchy HIERARCHY]
[--add ADD]
[--multiply MULTIPLY]
[--fp16 FP16]
[--replace REPLACE]
[--verbose VERBOSE]
Usage help
-h, --help show this help message and exit
--model_format pre-trained model format, options:caffe/onnx/nnef [required]
--model_name model name [required]
--model pre_trained model file/folder [required]
--model_input_dims c,h,w - channel,height,width [required]
--model_output_dims c,h,w - channel,height,width [required]
--model_batch_size n - batch size [required]
--rocal_mode rocal mode (1/2/3) [required]
--label labels text file [required]
--output_dir output dir to store ADAT results [required]
--image_dir image directory for analysis [required]
--image_val image list with ground truth [optional]
--hierarchy AMD proprietary hierarchical file [optional]
--add input preprocessing factor [optional - default:[0,0,0]]
--multiply input preprocessing factor [optional - default:[1,1,1]]
--fp16 quantize model to FP16 [optional - default:no]
--replace replace/overwrite model [optional - default:no]
--verbose verbose [optional - default:no]
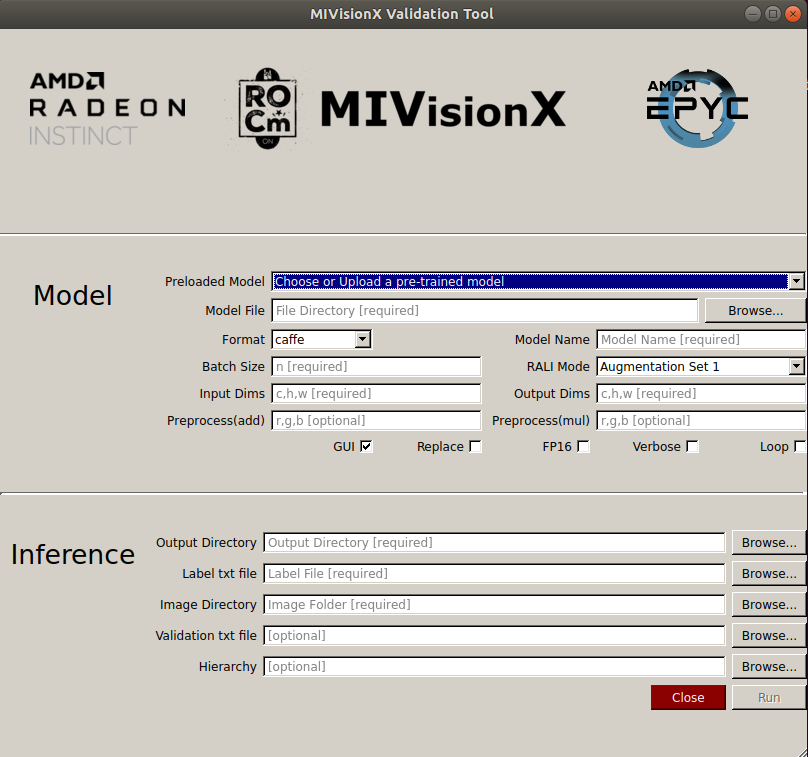
Graphical User Interface (GUI)
usage: python mivisionx_validation_tool.py
Supported Pre-Trained Model Formats
- Caffe
- NNEF
- ONNX
Samples
Sample 1 - Using Pre-Trained ONNX Model
Run SqueezeNet on sample images
- Step 1: Clone MIVisionX Validation Tool Project
cd && mkdir sample-1 && cd sample-1
git clone https://github.com/kiritigowda/MIVisionX-validation-tool.git
**Note:**
- MIVisionX needs to be pre-installed
- MIVisionX Model Compiler & Optimizer scripts are at
/opt/rocm/libexec/mivisionx/model_compiler/python/ -
ONNX model conversion requires ONNX install using
pip install onnx - Step 2: Download pre-trained SqueezeNet ONNX model from ONNX Model Zoo - SqueezeNet Model
wget https://s3.amazonaws.com/download.onnx/models/opset_8/squeezenet.tar.gz
tar -xvf squeezenet.tar.gz
Note: pre-trained model - squeezenet/model.onnx
-
Step 3: Use the command below to run the inference validation tool
-
View inference validation tool usage
cd ~/sample-1/MIVisionX-validation-tool/ export PATH=$PATH:/opt/rocm/bin export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:/opt/rocm/lib python mivisionx_validation_tool.py -h -
Run SqueezeNet Inference validation tool
python mivisionx_validation_tool.py --model_format onnx --model_name SqueezeNet --model ~/sample-1/squeezenet/model.onnx --model_input_dims 3,224,224 --model_output_dims 1000,1,1 --model_batch_size 64 --rocal_mode 1 --label ./sample/labels.txt --output_dir ~/sample-1/ --image_dir ../../data/images/AMD-tinyDataSet/ --image_val ./sample/AMD-tinyDataSet-val.txt --hierarchy ./sample/hierarchy.csv --replace yes
-
Sample 2 - Using Pre-Trained Caffe Model
Run VGG 16 on sample images
- Step 1: Clone MIVisionX Inference Validation Tool Project
cd && mkdir sample-2 && cd sample-2
git clone https://github.com/kiritigowda/MIVisionX-validation-tool.git
Note:
- MIVisionX needs to be pre-installed
-
MIVisionX Model Compiler & Optimizer scripts are at
/opt/rocm/libexec/mivisionx/model_compiler/python/ - Step 2: Download pre-trained VGG 16 caffe model - VGG_ILSVRC_16_layers.caffemodel
wget http://www.robots.ox.ac.uk/~vgg/software/very_deep/caffe/VGG_ILSVRC_16_layers.caffemodel
-
Step 3: Use the command below to run the inference validation tool
-
View inference validation tool usage
cd ~/sample-2/MIVisionX-validation-tool/ export PATH=$PATH:/opt/rocm/bin export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:/opt/rocm/lib python mivisionx_validation_tool.py -h -
Run VGGNet-16 Inference Validation Tool
python mivisionx_validation_tool.py --model_format caffe --model_name VggNet-16-Caffe --model ~/sample-2/VGG_ILSVRC_16_layers.caffemodel --model_input_dims 3,224,224 --model_output_dims 1000,1,1 --model_batch_size 64 --rocal_mode 1 --label ./sample/labels.txt --output_dir ~/sample-2/ --image_dir ../../data/images/AMD-tinyDataSet/ --image_val ./sample/AMD-tinyDataSet-val.txt --hierarchy ./sample/hierarchy.csv --replace yes
-

Sample 3 - Using Pre-Trained NNEF Model
Run VGG 16 on sample images
- Step 1: Clone MIVisionX Inference Validation Tool Project
cd && mkdir sample-3 && cd sample-3
git clone https://github.com/kiritigowda/MIVisionX-validation-tool.git
Note:
- MIVisionX needs to be pre-installed
- MIVisionX Model Compiler & Optimizer scripts are at
/opt/rocm/libexec/mivisionx/model_compiler/python/ -
NNEF model conversion requires NNEF python parser installed
- Step 2: Download pre-trained VGG 16 NNEF model
mkdir ~/sample-3/vgg16
cd ~/sample-3/vgg16
wget https://sfo2.digitaloceanspaces.com/nnef-public/vgg16.onnx.nnef.tgz
-
Step 3: Use the command below to run the inference analyzer
-
View inference validation tool usage
cd ~/sample-3/MIVisionX-validation-tool/ export PATH=$PATH:/opt/rocm/bin export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:/opt/rocm/lib python mivisionx_validation_tool.py -h -
Run VGGNet-16 Inference Validation Tool
python mivisionx_validation_tool.py --model_format nnef --model_name VggNet-16-NNEF --model ~/sample-3/vgg16/ --model_input_dims 3,224,224 --model_output_dims 1000,1,1 --model_batch_size 64 --rocal_mode 1 --label ./sample/labels.txt --output_dir ~/sample-3/ --image_dir ../../data/images/AMD-tinyDataSet/ --image_val ./sample/AMD-tinyDataSet-val.txt --hierarchy ./sample/hierarchy.csv --replace yes
-
-
Preprocessing the model: Use the –add/–multiply option to preprocess the input images
python mivisionx_validation_tool.py --model_format nnef --model_name VggNet-16-NNEF --model ~/sample-3/vgg16/ --model_input_dims 3,224,224 --model_output_dims 1000,1,1 --model_batch_size 64 --rocal_mode 1 --label ./sample/labels.txt --output_dir ~/sample-3/ --image_dir ../../data/images/AMD-tinyDataSet/ --image_val ./sample/AMD-tinyDataSet-val.txt --hierarchy ./sample/hierarchy.csv --replace yes --add [-2.1179,-2.0357,-1.8044] --multiply [0.0171,0.0175,0.0174]